
Precision manufacturing in the current industrial landscape demands an unprecedented level of accuracy that traditional two-dimensional imaging systems simply cannot provide when dealing with complex geometries. As automated assembly lines become more intricate, the necessity for robust three-dimensional anomaly localization has shifted from a luxury to a fundamental requirement for maintaining global quality standards. However, the move from laboratory prototypes to active factory environments has been stalled by significant technical barriers, including the prohibitive cost of annotating vast datasets and the extreme memory consumption of high-fidelity models. Addressing these critical gaps, a joint research initiative between the Shibaura Institute of Technology and FPT University has successfully launched Vote3D-AD. This innovative framework utilizes a sophisticated unsupervised learning approach that operates solely on defect-free data, effectively removing the reliance on expensive libraries of labeled anomalies while providing a streamlined architecture for real-world use.
Redefining Standards: Overcoming Traditional Inspection Hurdles
Historically, the reliance on template matching or “golden samples” has created a fragile ecosystem where even minor deviations in an object’s position or slight updates to a product’s design could cause a complete system failure. These rigid methodologies require a perfect reference for every single item on the line, which becomes an operational nightmare in facilities that manage diverse or frequently updated product catalogs. Furthermore, many existing high-accuracy frameworks necessitate massive feature stores and multiple inference passes, which inevitably create bottlenecks that slow down high-speed production. The hardware requirements for such systems often exceed the budgets of mid-sized manufacturers, leaving a significant portion of the industry without access to advanced 3D inspection tools. Consequently, there has been a pressing need for a more flexible and lightweight solution that can adapt to the dynamic nature of modern manufacturing without sacrificing precision.
The data bottleneck represents another formidable challenge that has historically limited the efficacy of machine learning in quality control environments. Because defects are inherently rare in a well-managed production facility, collecting thousands of real-world examples of cracks, dents, or structural holes is both a time-consuming and expensive endeavor. This scarcity of negative data often leads to biased models that struggle to recognize novel irregularities they did not encounter during the training phase. Additionally, older detection systems frequently rely on hand-tuned clustering algorithms that require constant human intervention and manual parameter adjustments to remain effective across different material types or surface finishes. This lack of autonomy in the learning process means that as the production environment evolves, the inspection system becomes increasingly obsolete. Vote3D-AD directly targets these inefficiencies by automating the clustering process and eliminating the need for manual oversight.
Technical Innovations: Synthesis and Spatial Context
The Vote3D-AD framework achieves its remarkable flexibility through a sophisticated Varied Defect Synthesis module that acts as a training catalyst for the unsupervised model. Since the system is trained exclusively on “normal” or pristine data, this module generates physically plausible pseudo-defects during the learning phase to prepare the model for real-world irregularities. It goes beyond simple noise injection by simulating complex geometric flaws such as bulges, cracks, and surface roughness, while also accounting for sensor-specific artifacts like data dropout or depth noise. By mirroring the actual physical properties of industrial materials, the system narrows the gap between simulated training environments and the messy reality of the factory floor. This proactive approach ensures that the model can identify a wide array of structural deviations even if it has never seen a specific type of failure before, providing a level of robustness that was previously unattainable.
Processing sparse point cloud data requires a deep understanding of spatial relationships, which the framework manages through a specialized transformer-based backbone. This architecture is exceptionally proficient at capturing long-range dependencies, allowing the system to understand the context of a surface rather than just analyzing isolated points in a vacuum. Following this initial processing, a unique voting network moves the analysis from the individual point level to a more holistic region-based perspective. Instead of merely flagging a single coordinate as anomalous, the network “votes” on the probable center of a defect, effectively grouping scattered signals into coherent clusters. This methodology significantly improves the clarity of the detection results, as it allows the system to distinguish between minor sensor noise and actual structural flaws. The transition to this voting-based logic represents a major departure from traditional point-cloud analysis and is a key driver of the model’s accuracy.
Mathematical Refinement: Differentiable Clustering and Results
A significant milestone in the engineering of Vote3D-AD is the implementation of a differentiable clustering module that replaces static, hand-tuned heuristics. This allows the framework to learn the most effective way to group anomalous points into object-level proposals during the training phase itself, resulting in much tighter and more coherent anomaly masks. By integrating the clustering logic directly into the neural network’s optimization path, the researchers ensured that the system could refine its boundaries without human guidance. This reduction in “scattered noise” is particularly beneficial when inspecting objects with complex textures or irregular shapes where traditional algorithms often struggle. The precision of the resulting masks allows for a more detailed assessment of the severity of a defect, enabling manufacturers to make better decisions regarding whether a part should be scrapped or could potentially be repaired through automated rework processes.
The quantitative success of this approach has been validated through extensive testing on both synthetic benchmarks and real-world industrial datasets. According to the research findings, Vote3D-AD consistently outperformed the strongest existing baselines across three critical performance metrics, including a 6.7% improvement in Point-level AUROC and a substantial 11.2% boost in the Point-F1 Score. These metrics are not just theoretical victories; they translate directly into higher reliability for automated inspection lines and fewer missed defects during high-volume production. Furthermore, the system demonstrated a 10.1% improvement in the Point-AUPR metric, which indicates a superior ability to maintain precision even when the ratio of anomalous points to normal points is extremely low. These advancements signal a major leap forward for the reliability of automated visual inspection systems, providing the data-driven confidence that industrial leaders require to fully automate their quality assurance.
Production Integration: Speed and Multi-Sector Versatility
Efficiency on the production line is measured in milliseconds, and the developers of Vote3D-AD optimized the framework to meet these rigorous timing requirements. Running on standard industrial hardware, the full pipeline operates at approximately 9.05 frames per second, which is more than sufficient for many high-speed assembly and sorting tasks. The researchers also developed higher-throughput variants that can be adjusted based on the specific latency needs of a facility, providing a scalable solution that fits various operational scales. This balance of high precision and low latency makes the framework a highly practical choice for sectors like electronics manufacturing, where components move rapidly and errors must be flagged instantly to prevent cascading failures. By maintaining high frames-per-second rates, the system ensures that the inspection process does not become the bottleneck that limits the overall productivity of the manufacturing plant.
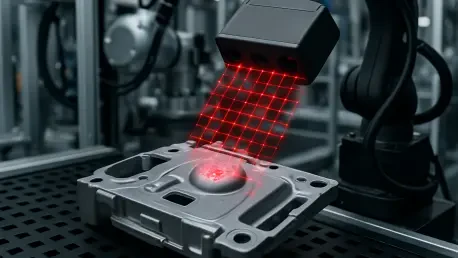
Beyond the speed of processing, the framework offers a level of versatility that traditional 2D cameras cannot match, especially when detecting subtle geometric faults. In industries dealing with machined metal parts or plastic injection molding, defects such as slight warping or surface roughness may not be visible in standard color images but are immediately apparent in 3D point clouds. Vote3D-AD can automatically identify these structural deviations or missing components that might be camouflaged by lighting conditions or surface reflections in a 2D environment. This capability significantly reduces the reliance on human inspectors, who are prone to fatigue and subjective errors during long shifts. By minimizing the frequency of false alarms and overlooked defects, the system effectively lowers the total cost of quality, ensuring that only parts meeting the strictest structural specifications move forward to the next stage of the assembly process.
Operational Flexibility: Logistics and Future Standards
From a strategic business perspective, the implementation of Vote3D-AD offers a compelling return on investment by drastically lowering the engineering burden associated with deploying AI. Because the system relies on learned clustering rather than manual template matching, it is remarkably easy to deploy across different product families with minimal downtime. A manufacturer can transition the system from inspecting automotive chassis components to consumer electronics housings with relative ease, as the model primarily requires examples of “normal” items to recalibrate its expectations. This operational flexibility is vital in a market where product lifecycles are shrinking and the ability to pivot production lines quickly is a competitive advantage. The reduction in manual configuration means that smaller enterprises can now leverage the same level of high-tech inspection as large-scale corporations without needing a massive team of data scientists.
The conclusion of this research project demonstrated that the integration of realistic defect synthesis with a differentiable architecture successfully solved the dual problems of data scarcity and heuristic fragility. By producing coherent region proposals rather than scattered outliers, the system provided data that was immediately actionable for human operators and downstream automated systems. Technicians were no longer required to decipher confusing clouds of red dots; instead, they were presented with clear, defined masks representing specific structural flaws. This clarity supported the automatic rejection of faulty parts and prioritized specific items for review, thereby increasing the overall safety and efficiency of the entire inspection pipeline. As industries continue to embrace the standards of a more automated future, this framework established a new benchmark for unsupervised machine learning and proved that high-precision 3D inspection is finally ready for widespread industrial adoption.